The difference between pi regulator and PID control _ Matlab pi regulator parameter selection _MATLAB inside PI control problem
The PI regulator is a linear controller that forms a control deviation according to a given value and an actual output value, and linearly combines the proportional and integral of the deviation to form a control amount to control the controlled object.
The PID controller adjusts the deviation of the entire control system according to the PID control principle, so that the actual value of the controlled variable is consistent with the predetermined value of the process requirement. Different control laws are applicable to different production processes, and the corresponding control laws must be reasonably selected. Otherwise, the PID controller will not achieve the expected control effect.
At present, the level of industrial automation has become an important indicator to measure the level of modernization in all walks of life. At the same time, the development of control theory has also experienced three stages of classical control theory, modern control theory and intelligent control theory. A typical example of intelligent control is a fuzzy fully automatic washing machine or the like. The automatic control system can be divided into an open loop control system and a closed loop control system. A control system includes a controller, a sensor, a transmitter, an actuator, and an input and output interface. The output of the controller is added to the controlled system through the output interface and the actuator; the controlled quantity of the control system is sent to the controller through the input interface through the sensor and the transmitter. Different control systems have different sensors, transmitters, and actuators. For example, pressure control systems use pressure sensors. The sensor of the electric heating control system is a temperature sensor. At present, there are many PID controls and their controllers or intelligent PID controllers (meters). The products have been widely used in engineering practice. There are various PID controller products, and all major companies have developed PIDs. The intelligent regulator of the parameter self-tuning function, wherein the automatic adjustment of the PID controller parameters is realized by intelligent adjustment or self-correction, adaptive algorithm. There are pressure, temperature, flow, and liquid level controllers that use PID control, programmable logic controllers (PLCs) that can implement PID control functions, and PC systems that can implement PID control.
P: Proportion I: integral D: differential adjustment
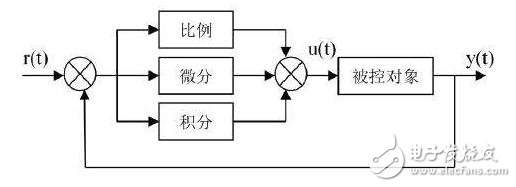
PID regulation is called proportional, integral, and differential adjustment. Its principle is to adjust the output signal to meet the set value by proportional integral differential (referring to the action of input and output deviation).
Mathematical differential equation expression: c(t)=ke(t)+t/tdde(t)/dt+TI/tSe(t)dt (S: meaning of integral symbol)
among them:
k is the proportional coefficient that determines the response strength of the system.
Td is the differential time. The smaller the value, the greater the differential effect, but it will affect the accuracy.
TI is the integration time. The larger the value, the more obvious the integral effect, but it will affect the speed.
The proportional effect determines the intensity of the system's response.
The differential action acts as an advanced control and can be eliminated before the error occurs.
The integral action serves to eliminate the error, but the response is slower.
Pid control is the most basic algorithm in industrial production and electronic design, and it is effective! However, sometimes PI control is used in the case where the system response speed is not high and the accuracy is high, that is, proportional and integral control.
Its mathematical expression is: c(t)=ke(t)+TI/tSe(t)dt (S: is the meaning of the integral notation).
Matlab's pi regulator parameter selection experience(1) Determine the proportional coefficient Kp
When determining the proportional coefficient Kp, first remove the integral term and the derivative term of the PID, and let TI=0, Td=0, make it become
Pure proportional adjustment. The input is set to 60%~70% of the maximum allowable output of the system. The proportional coefficient Kp gradually increases from 0 until the system oscillates. Conversely, the proportional coefficient Kp decreases from this time until the system oscillation disappears. The proportional coefficient Kp at this time is recorded, and the proportional coefficient Kp of the PID is set to be 60% to 70% of the current value.
(2) Determine the integral time constant Ti
After the proportional coefficient Kp is determined, a larger integral time constant Ti is set, and then Ti is gradually decreased until the system oscillates, and then, in turn, Ti is gradually increased until the system oscillation disappears. The Ti at this time is recorded, and the integral time constant Ti of the PID is set to be 150% to 180% of the current value.
(3) Determine the differential time constant Td
The differential time constant Td is generally not set, and is 0. At this time, the PID adjustment is converted to PI adjustment. If it is necessary to set, it is the same as the method of determining Kp, taking 30% of its value when not oscillating.
(4) System no-load, on-load joint adjustment
Fine-tune the PID parameters until the performance requirements are met.
Small class of knowledge: PI control problem in MATLAB(How to get this PI controller with a download symbol, click the download symbol to pop up the window below)
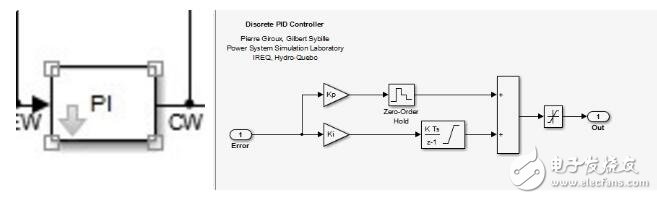
In fact, that is the specific implementation under the PI module, you do not need to understand the stuff inside the module, as long as you will set the parameters for the PI module.
How to use pi controller in matlab?
Select the pid module in simulink, then enter 0 for parameter D.
Dell have been one of the few Western companies to make significant inroads into the huge laptop and netbook market. Started in Texas by Michael Dell, the company has become a power-house of the technology sector.
Dell laptop charger include Dell Inspiron charger series, Dell Latitude charger series, Dell Precision charger series,Dell XPS charger series, Dell Studio charger series, and Dell Vostro charger series. The common Dell Laptop Charger specification has 19.5V 3.34A 65W, 19.5V 4.62A 90W, 20V 4.5A 90W etc, and the dc tip has common 5.5*2.5mm and 7.4*5.0mm with pin inside, 4.0*1.7mm bullet etc. Also Yidashun has developed the 30W 45W 65W and 90W type c Adapter for Dell.
If you want to look for a high quality replacement laptop charger for Dell laptop, Yidashun is a right choice. Yidashun can offer all models of laptop charger adapter for Dell, and our laptop adapter is with smart IC to protect your laptop with over current protection, over load protection, short circuit protection and over heat protection.
All our Dell laptop charger is Brand New Replacement Product, works as Genuine parts, 100% OEM Compatible!



Dell Laptop Charger,Dell Charger,Dell Inspiron Charger,Dell Computer Charger
Shenzhen Yidashun Technology Co., Ltd. , https://www.ydsadapter.com